視頻編解碼芯片設(shè)計原理----07 重建環(huán)路?
本系列主要介紹視頻編解碼芯片的設(shè)計,以HEVC視頻編碼標(biāo)準(zhǔn)為基礎(chǔ),簡要介紹編解碼芯片的整體硬件架構(gòu)設(shè)計以及各核心模塊的算法優(yōu)化與硬件流水線設(shè)計。
本文給出了HEVC重建環(huán)路的相關(guān)背景知識,并在此基礎(chǔ)上分析了VLSI實現(xiàn)下重建環(huán)路所面臨的實際問題,并有針對地在模塊層次和架構(gòu)層次對重建環(huán)路進(jìn)行了優(yōu)化。
概述
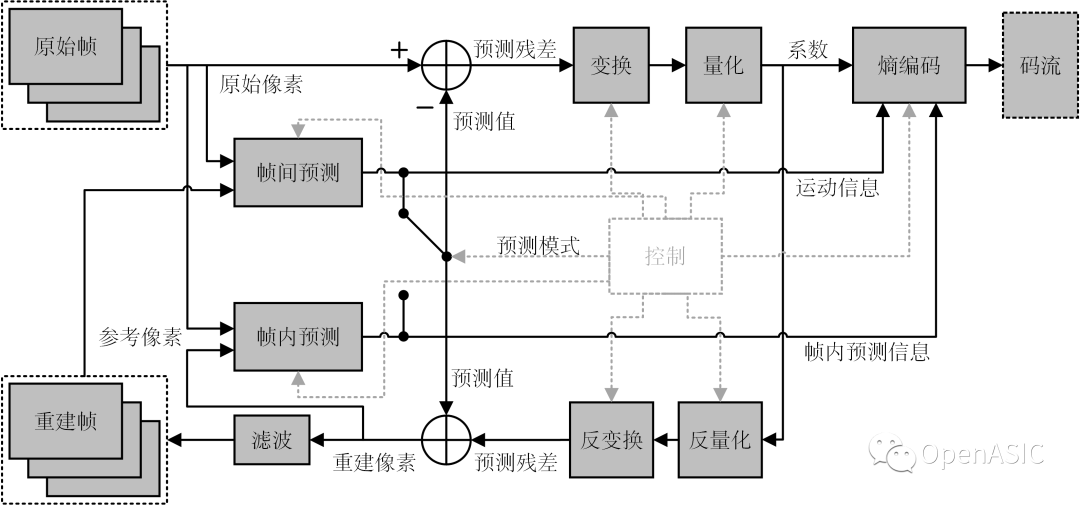
重建環(huán)路,指的是在重建的過程中,對于當(dāng)前塊的處理必須依賴于前一塊的處理結(jié)果,導(dǎo)致預(yù)測、變換、量化、反量化、反變換和重建的這一系列過程成為了一條首尾相連的環(huán)路。變換是將空間域像素形式描述的圖像轉(zhuǎn)換至變換域,以變換系數(shù)的形式呈現(xiàn)。量化是在變換的基礎(chǔ)上對變換系數(shù)進(jìn)一步處理,壓縮視頻信息量,減小視頻碼率。
在HEVC 標(biāo)準(zhǔn)中,“重建環(huán)路”如下圖所示。其中,由預(yù)測像素和原始像素相減所得到的殘差像素被送往離散余弦變換(DCT)模塊和量化(Q)模塊,用以得到熵編碼(CABAC)模塊所需要的變換系數(shù)。與此同時,這些變換系數(shù)還被送往反量化(IQ)模塊和反變換(IDCT)模塊用以產(chǎn)生重建后的殘差和重建后的像素。
變換與反變換
將一維N個實數(shù)采樣值變換為N個變換域上的變換系數(shù)的過程稱為一維DCT。DCT變換是一個線性的可逆過程,將N個變換系數(shù)重構(gòu)為N個實數(shù)采樣值的過程稱為逆DCT。二維N×M空間的DCT/IDCT變換定義為如下。
DCT的矩陣系數(shù)中包含實數(shù),這種浮點DCT變換會引入浮點乘法計算,并且正變換與逆變換由于精度誤差可能產(chǎn)生偏移,因此H.264/AVC、AVS、HEVC等視頻編碼標(biāo)準(zhǔn)都采用了整數(shù)DCT變換。
4×4 的DCT 整數(shù)變換矩陣:
8×8 的DCT 整數(shù)變換矩陣:
DCT整數(shù)變換是對離散余弦變換的近似,具有可分離性、對稱性、遞歸性等特性。可分離性指二維變換可以通過兩次一維變換實現(xiàn),即先對輸入數(shù)據(jù)做行(列)變換,然后對中間結(jié)果做列(行)變換。對稱性是指N階DCT整數(shù)變換矩陣中每一行元素具有對稱性:偶數(shù)行元素左右對稱,奇數(shù)行元素左右反對稱。遞歸性可以用8×8變換矩陣來舉例,可以看到,8×8變換矩陣的第0、2、4、6行的左半部分元素合起來形成的4×4矩陣,即為HEVC中的4×4變換矩陣。
量化與反量化
HEVC中的量化計算過程如下式所示。
反量化計算過程下式所示,其中裁剪的步驟確保了變換系數(shù)量化后的值保持16bit位寬。
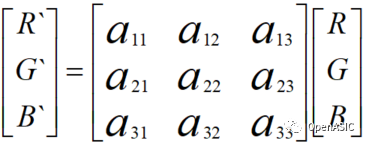
其中參數(shù)Q和IQ的定義如下:
其他參數(shù),如coeff代表經(jīng)過二維整數(shù)離散余弦變換后的系數(shù);level代表量化后的系數(shù)值;coeffQ代表反量化后的系數(shù)值。參數(shù)QP代表量化參數(shù);B代表位深;N代表變換尺寸;M=log2(N)。
VLSI實現(xiàn)
設(shè)計考量
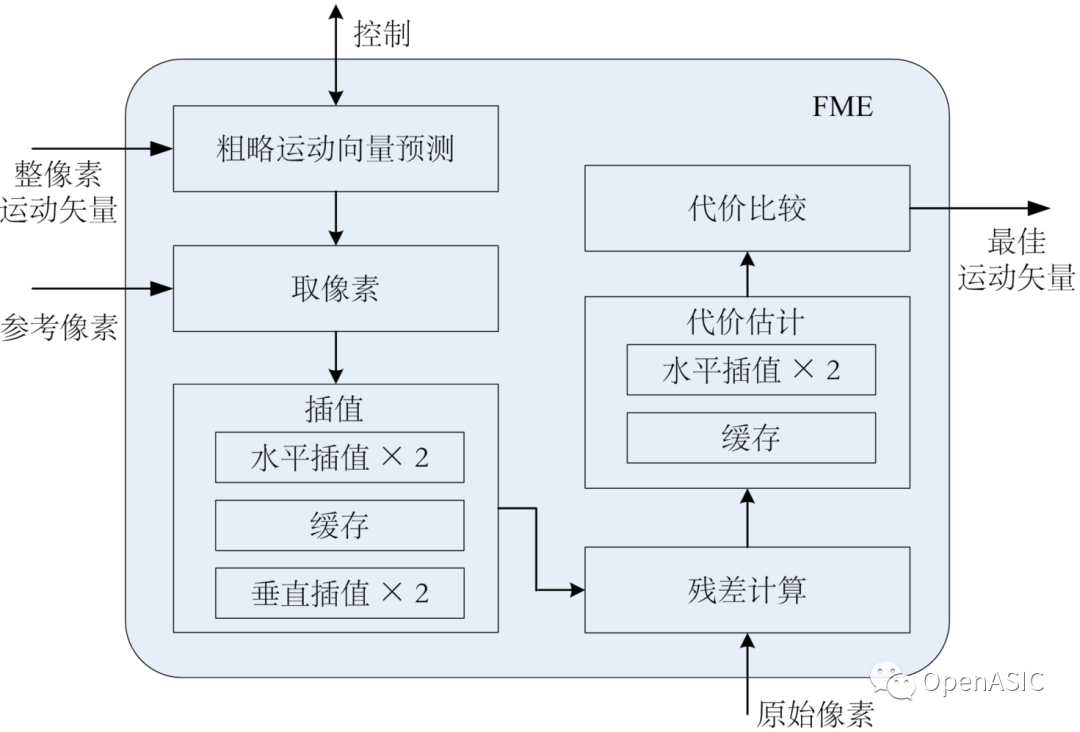
重建環(huán)路在硬件代價上和周期代價上都是HEVC編碼器的實現(xiàn)瓶頸。硬件代價直接來源于復(fù)雜的預(yù)測模式和32×32大小的DCT變換。周期代價則來源于棘手的數(shù)據(jù)依賴、PU模式的選擇和CU、PU、TU塊劃分的決定,提高對于單個TU/PU的處理速度對于重建環(huán)路來說是十分必要的。
變換與反變換
1D-DCT的計算過程可進(jìn)行如下的分解
其中
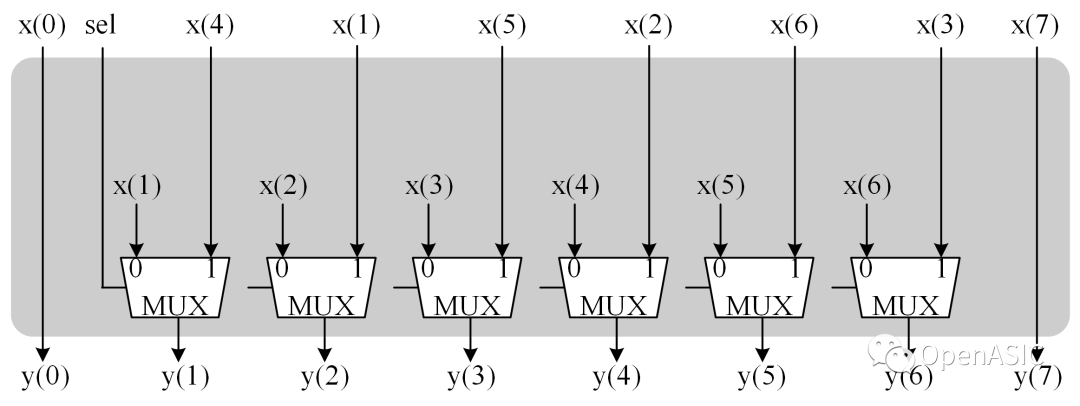
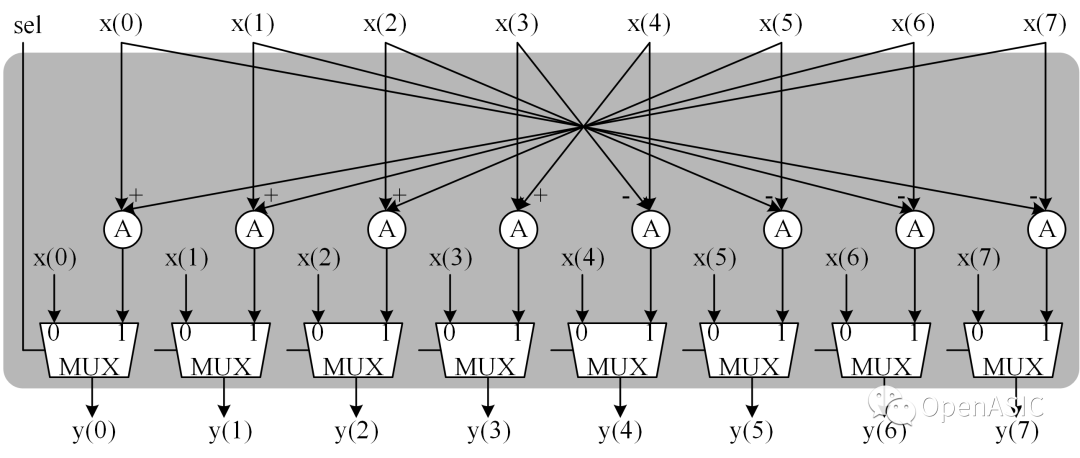
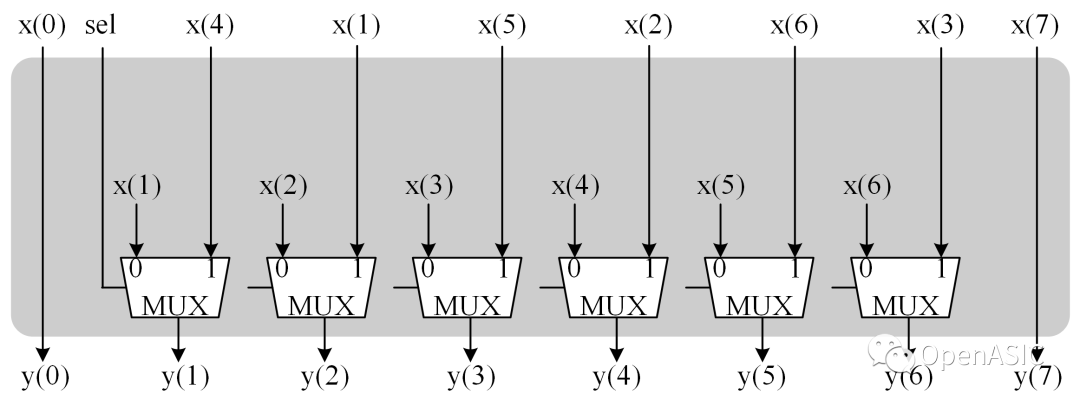
因此,N點1D-DCT的硬件實現(xiàn)可以分為四個基本矩陣向量積模塊,即BN*XNT模塊、AN/2*XN/2T模塊、RN/2*XN/2T模塊、PN*XNT模塊,由基本模塊可以實現(xiàn)高性能的1D-DCT變換。
BN*XNT模塊的硬件設(shè)計以B8*X8T為例,如下圖所示。
AN/2*XN/2T模塊的硬件設(shè)計以A4*X4T為例,如下圖所示。
RN/2*XN/2T模塊的硬件設(shè)計以R4*X4T為例,如下圖所示。
PN*XNT模塊的硬件設(shè)計以P8*X8T為例,如下圖所示。
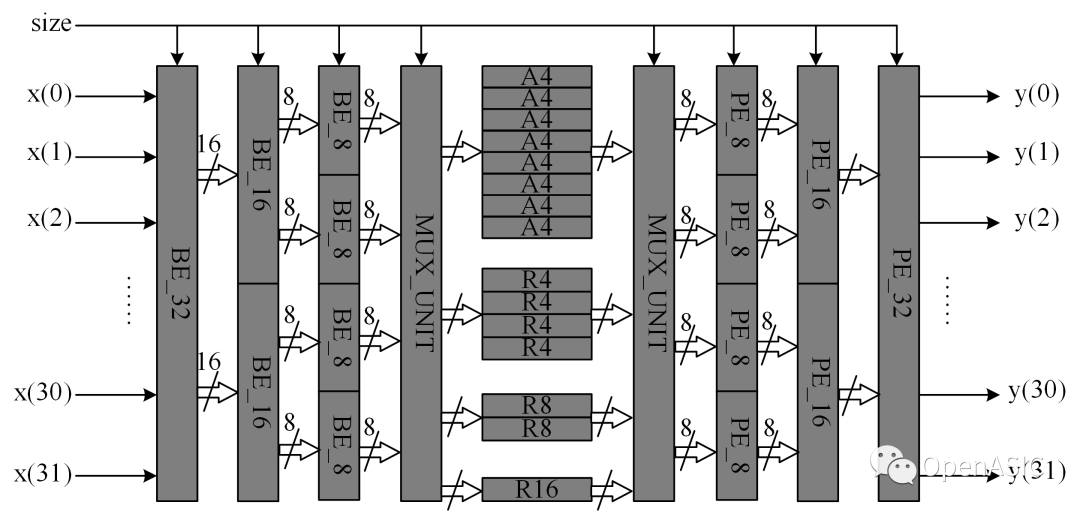
由模塊化的設(shè)計方法,可以得到同時支持4點、8點、16點、32點DCT變換的硬件結(jié)構(gòu)。適當(dāng)?shù)卣{(diào)整算法,可以得到一種吞吐率為32點/周期的結(jié)構(gòu),該變換結(jié)構(gòu)一個周期可以處理8條4點輸入向量,4條8點輸入向量,2條16點輸入向量,1條32點輸入向量。下圖顯示了固定吞吐率為32點每周期的高吞吐率1D-DCT變換硬件結(jié)構(gòu)。
進(jìn)一步地,由于1D-DCT和1D-IDCT的計算過程相似,均可分三步進(jìn)行,但運算過程相反。通過一定的算法改進(jìn)DCT和IDCT可以用一套硬件實現(xiàn),相比于分立實現(xiàn),復(fù)用結(jié)構(gòu)可以大大減小硬件開銷。下圖說明了一維DCT模塊在正變換和反變換上的復(fù)用。
轉(zhuǎn)置存儲器
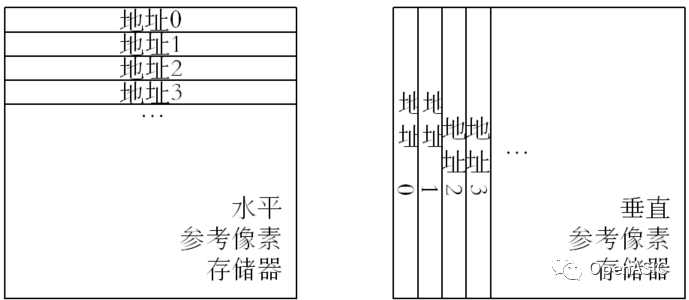
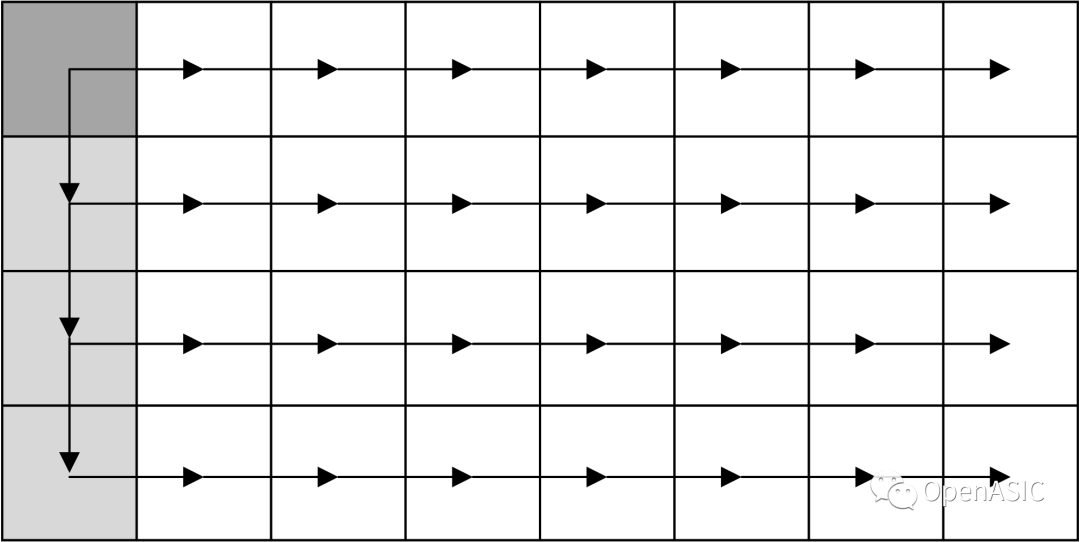
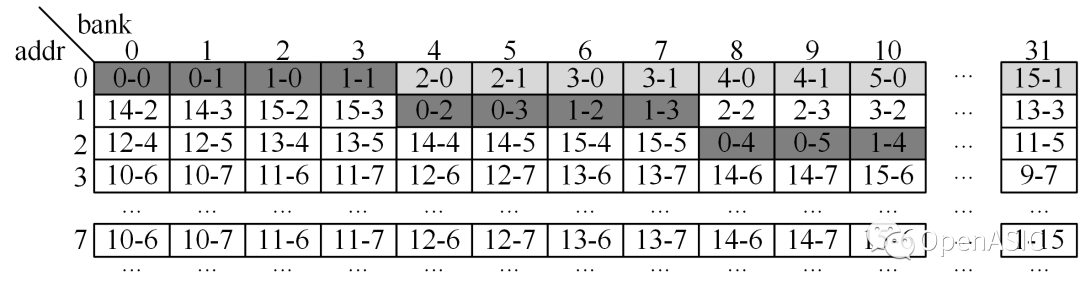
有研究者提出了一種基于單端口SRAM的轉(zhuǎn)置矩陣的地址映射算法[1]。該結(jié)構(gòu)采用一種對角線螺旋式的數(shù)據(jù)映射方式,可以實現(xiàn)與TU尺寸大小相等的數(shù)據(jù)吞吐率,如下圖所示。
為了能夠支持恒定32點每周期的變換/反變換模塊,此處對該映射方法進(jìn)行了擴(kuò)展。具體地,在處理32×32大小的TU時,仍然按照上述的方法進(jìn)行映射。在處理16×16大小的TU時,按照下所示的方式映射,映射到每個bank的前7個地址。
在處理08×08大小的TU時,按照下所示的方式映射,映射到每個bank的前2個地址。
顯然地,在這一方式下,無論是32×32塊,還是16×16塊,亦或8×8塊都能夠滿足32像素每周期的轉(zhuǎn)置速度。
量化和反量化
量化和反量化的主要運算都是乘法、加法和移位,因此HEVC中量化和反量化的計算可以由統(tǒng)一的公式表示,如下所示:
其中,input表示輸入系數(shù);q表示量化或反量化的系數(shù);offset表示補(bǔ)償量;shift表示移位的比特數(shù);
在量化過程中,參數(shù)q=f(QP%6),offset根據(jù)RDOQ的開關(guān)情況進(jìn)行調(diào)整,shift=21+QP/6-M-(B-8)。
在反量化過程中,參數(shù)q=g(QP%6)<<(QP/6),offset=1<<(M-2+(B-8)),shift=1<<(M-1+(B-8))。
由計算過程可知,量化、反量化以及量化與反量化硬件復(fù)用模塊的硬件設(shè)計均可分為兩部分:參數(shù)計算模塊和主體運算模塊。
下圖所示為Q/IQ復(fù)用模塊的參數(shù)計算單元,輸出為q,offset,shift三個基本參數(shù)。輸入為量化步長QP,控制信號CTRL,位深B。
下圖所示為Q/IQ復(fù)用結(jié)構(gòu)的主體運算單元,量化與反量化可分為乘,加,移位,截位四部分,為了獲得更高的性能,可以將主體運算單元分兩級流水進(jìn)行:乘法操作為第一級,加法,移位和截位操作為第二級。
下圖所示為N路并行的Q/IQ硬件復(fù)用結(jié)構(gòu),該結(jié)構(gòu)可以支持N路并行的量化、反量化以及量化與反量化復(fù)用的操作。
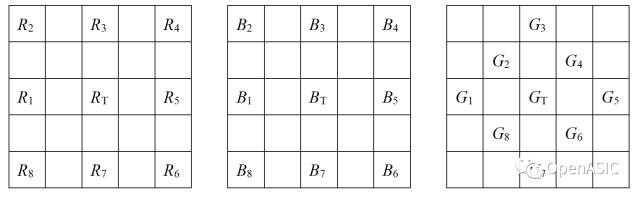
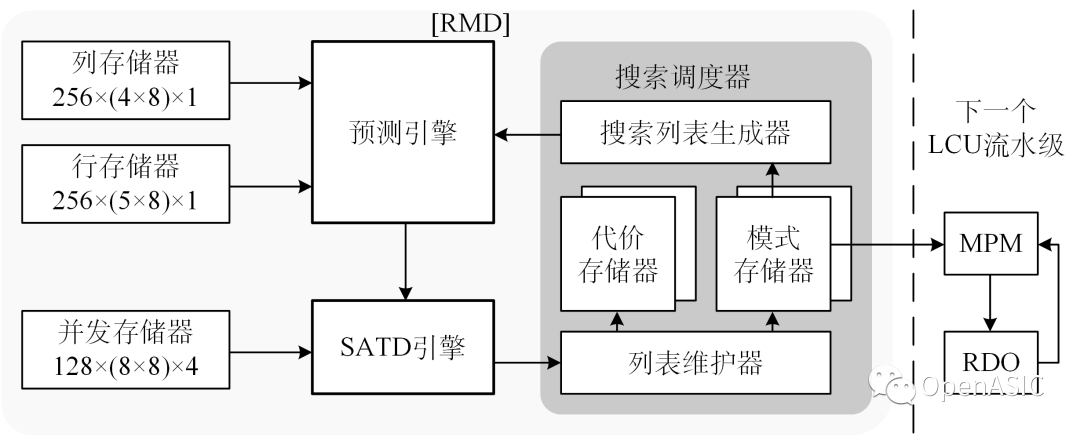
并發(fā)存儲器
對于預(yù)測、去方塊化和熵編碼模塊,由于其處理的基本單元是4×4塊,因此,一般采用4×4塊的輸入輸出格式。此處,我們將這種格式稱為塊格式。對于像素讀入,考慮到總線和外部存儲器的突發(fā)傳輸特性,像素一般按照光柵順序讀入。此處,我們將這種格式稱為行格式。本文提出的并發(fā)存儲器就是為了以極少的資源代價完成對于上述格式的快速轉(zhuǎn)換。下圖將給出并發(fā)存儲器的具體映射方法。
使用并發(fā)存儲器,所有左右相鄰的4個1×8行都被映射到了不同的Bank中,因此,不管是1×32,1×16還是1×8都能夠沒有沖突地被訪問;特別地,所有上下相鄰的2個1×16行和相鄰的4個1×8行也被映射到了不同的Bank中,因此,不管是2×16,還是4×8都能夠沒有沖突地被訪問。
架構(gòu)優(yōu)化
重建環(huán)路多數(shù)的周期都被消耗在了4×4大小的TU上,但另一方面,4×4塊變換的復(fù)雜度遠(yuǎn)比大塊變換簡單得多。因此,本文對4×4專用通路進(jìn)行了優(yōu)化。優(yōu)化后,重建環(huán)路的時空圖如下所示。此時,周期數(shù)已經(jīng)減至2880周期。
當(dāng)重建環(huán)路不僅負(fù)責(zé)PU劃分還負(fù)責(zé)PU模式的決定時,可以選擇兩種不同的結(jié)構(gòu)。若仍采用全復(fù)用的方式,則時空圖如下所示,對應(yīng)的周期數(shù)為9816。
值得注意的是,對于同一塊不同模式的預(yù)測是不存在數(shù)據(jù)依賴的,因此,上圖中對于模式1正向行變換和對于模式0的正向列變換完全可以并行。此時,重建環(huán)路的時空圖如下圖所示。采用這一架構(gòu)后,重建環(huán)路在消耗10092周期的情況下所遍歷的模式數(shù)高達(dá)13個。
資源代價分析
下表給出各個模塊所占用的資源代價。由表可知,未復(fù)用前,變換/反變換模塊的ALUT數(shù)目高達(dá)108713個,優(yōu)化后ALUT數(shù)目減少為47746個,減少了56.08%的資源消耗;未復(fù)用前,量化反量化的ALUT數(shù)目為11135,優(yōu)化后ALUT數(shù)目減少為6198個,減少了44.34%的資源消耗。



對于全復(fù)用結(jié)構(gòu),其ALUT代價僅為64K,但在500MHz工作頻率下該結(jié)構(gòu)只能夠遍歷所有劃分的5種幀內(nèi)預(yù)測模式;對于半復(fù)用結(jié)構(gòu),其ALUT代價為97K,但在500MHz工作頻率下該結(jié)構(gòu)能夠遍歷所有劃分的13種幀內(nèi)預(yù)測模式。在編碼器實現(xiàn)時,應(yīng)根據(jù)幀內(nèi)前預(yù)測所提供的模式的準(zhǔn)確度、系統(tǒng)所需的編碼效果要求和硬件代價要求綜合選擇合適的復(fù)用結(jié)構(gòu)。
參考文獻(xiàn):
[1] S. Shen, W. Shen, Y. Fan and X. Zeng.AUnified 4/8/16/32-Point Integer IDCT Architecture for Multiple Video CodingStandards[A].IEEE International Conference on Multimedia and Expo[C].IEEE,2012:788-793.
模塊用以產(chǎn)生重建后的殘差和重建后的像素_1652346527094.png)

變換矩_1652346573973.png)
變換矩_1652346582083.png)
量化后的值保持16bit位_1652346653983.png)
Q和IQ的定_1652346764588.png)
行如下的分_1652346808876.png)



_1652405852025.png)
據(jù)吞吐_1652405899639.png)





已經(jīng)減至2880周_1652406177300.png)
的周期數(shù)為981_1652406206368.png)
高達(dá)1_1652406250267.png)